|
|
Air Traffic |
|
|
|
|
Issue
# 2003-5 Advanced RNAV
Procedures and Aircraft Behavior /*TRE/ The purpose of this article is to familiarize controllers with terminal area navigation (RNAV) procedure structure and expected aircraft behavior. First described are terminal RNAV benefits and the "building blocks" of an RNAV standard terminal arrival route (STAR) and standard instrument departure (SID). The next section explains the expected behavior of aircraft flying advanced RNAV routes. The final section discusses the accuracy of RNAV and the use of radar vectors with RNAV procedures. Although the focus of this article is on terminal procedures, the flight behavior described is applicable to both the terminal and en route environments. RNAV Today.
RNAV allows an aircraft to operate on any desired path without the need to fly directly toward or away from a ground-based navigation aid (NAVAID). Aircraft position is determined using NAVAIDs, a self-contained system (such as an inertial reference system), the global positioning satellite system (GPS) or a combination of these. Pilots are provided with distance, time, bearing and cross track error relative to a route or point in space. Although once used primarily for en route navigation, RNAV routes are increasingly being designed for terminal area use. Advanced RNAV includes the ability to access a navigation database containing the points, routes, speeds and altitudes for a specific procedure. This data may be loaded into an aircraft flight management system (FMS) or instrument flight rules certified GPS system creating a path that can be followed using the flight director or autopilot. Advanced RNAV is limited to aircraft with the equipment suffixes of /E, /F, /G, /R or /Q.1 Benefits of RNAV. There are several potential benefits to terminal RNAV routes including: 1) More direct routing, saving time and fuel. 2) Fewer radio transmissions due to less need for controller instructions. 3) Increased airspace/runway capacity through the use of defined paths. 4) Increased flight path predictability and repeatability when compared to radar vectoring. There are also potential disadvantages to using RNAV in the terminal area:2 1) Controllers will need to provide services to both RNAV and non-RNAV aircraft within the same airspace. 2) RNAV databases and equipment are not fully standardized, and there is no firm guidance on how the information is processed by aircraft systems. Tracks may be flown slightly differently due to equipment, pilot technique or airline policies. However, these track differences should not be significant enough to appear as deviations from the published procedure. 3) Initially, controllers may be uncertain of the expected aircraft behavior during an RNAV turn, which may result in unnecessary vectors. A common factor in each case is that RNAV procedures in the terminal area are relatively new. Over time the number of RNAV operations should increase. Good procedure design, effective training, and experience with terminal RNAV will increase pilot and controller confidence in RNAV procedures. The Building Blocks. Every RNAV STAR and SID is built from one or more segments. (See Figure 1.) Each segment has a specific function and requirements.
Figure 1: STAR and SID Segments
1) Runway transitions: the portion of the procedure between the runway/s and the common route/point. Procedures may contain one or more runway transitions, but this is not a required segment and may not be a part of all procedures. 2) Common route/point: the portion of the procedure that is common to all runway and en route transitions. The common route may consist of a single waypoint. 3) En route transition: the portion of the procedure between an en route transition fix and the common route/point. Most procedures contain more than a single en route transition. Each RNAV procedure segment contains two basic parts: 1) Waypoint: A position defined by latitude and longitude coordinates. A waypoint may be a named point in space or associated with existing NAVAIDs, intersections or fixes. A waypoint is most often used to indicate a change in direction, speed, or altitude along the desired path. There are two types of waypoints: fly-over and fly-by. 2) Leg types: The path before, after or between waypoints. Leg types are identified by a two-letter code that describes the path (e.g., heading, course, track, etc.) and the end point (e.g., the path ends at an altitude, distance, fix, etc.). These coded leg types are used in the aircraft navigation database, but are not shown on the procedure chart. For air traffic controllers and pilots, the key to how a procedure should be flown is the narrative description and graphic depiction shown on the RNAV procedure chart.
RNAV Flight Behavior This section describes expected flight behavior of aircraft operating in the terminal or en route RNAV environment. Waypoints Defined. How an aircraft will fly an RNAV, STAR or SID procedure depends upon the type of waypoints and legs used in the procedure. Waypoints are normally used to indicate a change in direction, altitude and/or airspeed. There are two types: fly-over and fly-by. The fly-by waypoint is the most common and is preferred for use in designing terminal RNAV procedures.
Figure 2: Fly-by and Fly-over Waypoints A change in direction at a fly-by waypoint requires the navigation system to "anticipate" the turn in order to intercept and fly the next leg. The amount of distance of turn anticipation (DTA), (see Figure 2) prior to the waypoint depends primarily on the aircraft speed and the angle of the turn. At a fly-over waypoint, the aircraft will not turn to intercept the following leg until passing over or abeam the waypoint. Aircraft speed and angle of turn will influence the resulting flight path. Fly-over waypoints are shown on charts within a circle. Given that some variation will always exist in the flight path, there is a much higher level of predictability and repeatability with a fly-by versus a fly-over waypoint. Fly-by waypoints also require less protected airspace than fly-over waypoints. Controllers should remember that aircraft normally maneuver inside of the turn prior to reaching a fly-by waypoint. For a fly-over waypoint, the turn will occur after reaching the waypoint. The final (terminating) waypoint of a procedure will be flown as a fly-over waypoint.
RNAV Leg Types. Commercial database providers "code" terminal RNAV procedures for use in aircraft navigation systems. The accepted coding format was created by Aeronautical Radio Incorporated (ARINC3) and is known as the ARINC 424 Navigation Database Specification. The specification describes over twenty different "path terminators" known as leg types. Leg types describe the path before, after or between waypoints. The FAA uses only a small subset of the available leg types in public procedures. A two-letter code describes the path (e.g., heading = V, course = C, track = T, etc.) and its ending point (e.g., an altitude = A, distance = D, fix = F,4 etc.). Although not explicitly depicted on charts, controllers and pilots can determine leg types (and thus expected aircraft behavior) by reading the chart narrative and viewing the graphic depiction. The most common leg types used by the FAA are defined below. 1) A "track" is a magnetic course between waypoints that must be intercepted and flown. This is the most common leg type and is coded as "TF." 2) A "course" is a magnetic course to a waypoint that must be intercepted and flown. A "CF" leg differs from a "TF" only in that it does not have a beginning waypoint. 3) "Direct" describes a direct course from an aircraft's position to a waypoint. A "DF" leg allows an immediate turn to a waypoint without requiring intercept of a particular course. A "heading" is a magnetic heading to be flown. Heading legs are subject to wind drift. A "VA" leg is a heading to an altitude and a "VM" is a heading to a "manual termination." The "VA" leg is often used as the first leg of an RNAV departure. The "VM" leg is most often used to end an RNAV STAR on, for example, a downwind leg heading.
Figure 3: Flight Path Behavior: Fly-over waypoint to a Track-to-Fix (TF) leg
Figure 4: Flight Path Behavior: Fly-over waypoint to a Direct-to-Fix (DF) leg. Figures 3 and 4 show examples of Track (TF) and Direct (DF) legs following a fly-over waypoint. In Figure 3, the aircraft will "track" from ALPHA to BRAVO by intercepting the magnetic course between the two waypoints. In Figure 4, the aircraft will proceed "direct" to BRAVO after crossing the fly-over waypoint ALPHA. In Figure 5, a VA, CF, TF combination has been used to create the initial portion of an RNAV SID.
Figure 5: Combined VA, CF and TF legs on an RNAV SID RNAV Accuracy and Vectoring This section discusses the accuracy of RNAV procedures and vectoring aircraft off of and onto RNAV SIDs, STARs and routes. RNAV Accuracy. The precision with which an RNAV procedure is flown depends on the navigation source and on the aircraft onboard equipment and database. Even though a standard format exists (i.e., ARINC 424), the coding of an RNAV SID or STAR into a database (or the interpretation of that coding) may vary slightly. Differences in the databases along with variations in aircraft performance may result in slightly different tracks between RNAV aircraft on the same procedure. This will be most apparent during turns and where fly-over waypoints are used. Tracking of a defined path by an RNAV aircraft is as accurate as, or better than, that of aircraft flying conventional routes. In fact RNAV is often used to fly conventional en route and terminal procedures Use of RADAR with RNAV. For aircraft assigned an RNAV STAR or SID, the role of the radar controller remains unchanged from conventional procedures. Standard radar separation applies and controllers may need to vector RNAV aircraft off of the RNAV route for spacing or sequencing. One advantage of RNAV SIDs and STARs is reduced ATC radio transmissions. Where speeds and altitudes are coded within the procedure controllers should not need to issue turns, speed or altitude assignments.5 Controllers only need to intervene if aircraft deviate from the defined vertical and/or lateral track, or when vectors are necessary for separation or sequencing. There are two important points to remember about removing aircraft from an RNAV procedure: 1) Controllers may assign altitudes or speeds other than those published on the procedure without requiring aircraft to leave the lateral path. 2) Removing an aircraft from the lateral path removes the aircraft from the procedure. Controllers should advise pilots if return to the RNAV procedure is expected since this may prevent the pilot from removing the procedure from the navigation system memory. As when removing any aircraft from a procedure, an altitude to maintain must be provided if the RNAV procedure included altitude information. When vectoring an aircraft onto an RNAV STAR, SID or route, vector direct to a waypoint.6 Assigned headings should minimize the intercept angle to the next leg to assist in preventing overshoot. Figure 6 shows the expected track of an aircraft vectored direct to a fly-by waypoint. Although no maximum angle has been defined, a good rule of thumb is to have the aircraft established on a track so that no more than a 45-degree turn is required to become established on the following leg (Angle A in Figure 6). The aircraft should be established on this track and the pilot advised to "proceed direct" at least 5 miles from the waypoint to which the aircraft is being vectored (Distance B in Figure 6).
Figure 6: Vector direct to BRAVO, a fly-by waypoint Many variables affect how an aircraft will intercept an RNAV procedure including distance from the waypoint, wind conditions, aircraft speed, rate of turn, and altitude. Controllers should be aware that overshoot of the new path may occur even when vectoring to a fly-by waypoint if, for example, a large course change is required close to the waypoint. This possibility may be particularly significant in some cases as illustrated in Figures 7 and 8.
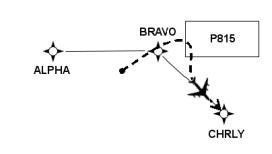
Figure 7: Overshoot of BRAVO
Figure 8: Fly-by of BRAVO In Figure 7, due to the short distance to BRAVO and the
large turn angle needed to intercept the next leg, an aircraft vectored
direct to BRAVO (a fly-by waypoint) overshoots the next leg and enters
P815. In Figure 8, an aircraft is vectored direct to BRAVO at less than a
45-degree angle and further from the waypoint (not less than 5 miles) so
that it is able to anticipate the turn and does not enter P815. These are
examples of normal RNAV behavior. To help avoid such an occurrence, when
vectoring aircraft onto RNAV procedures, controllers should be aware of
possible aircraft behavior and take measures to help mitigate it.
(ATP-500) Footnotes: 1 FAA, Aeronautical Information
Manual, Table 5-1-2 |